|
I am currently a Ph.D. candidate in the Hybrid Planning for AI and Robotics (HyPAIR) group, with the Intelligent Robotics Lab at the University of Birmingham, supervised by Dr. Masoumeh Mansouri. Prior to this, I obtained my B.Eng. degree in Automation from Southwest Jiaotong University and M.Sc. degree in Robotics from the University of Birmingham. My research interests focus on Multi-Robot Systems (MRS), Multi-Robot Motion Planning, Formation Control, and Multi-Robot Coordination. My current research is integrating AI techniques with optimal control to address a variety of multi-robot coordination problems, which commonly arise in domains such as warehouse logistics, manufacturing, and exploration. |

|
|
🎓 I am expected to graduate in 2026 and am actively seeking a full-time position or internship starting opportunities. If you are interested in collaboration, please feel free to contact me. |
|
[07/2026] I successfully defended my Ph.D. thesis! Thesis committee: Dr. Yongjing Wang, Prof. Wei Pan, and Dr. Rami Bahsoon. [07/2026] I started an internship at GENISOM AI, mentored by Prof. Wei Pan. [05/2026] One paper is accepted by CASE 2026. [03/2026] I won the award for Exceptional Research Contribution of Doctoral Researchers in the College of Engineering and Physical Sciences. [01/2026] One paper is accepted by ICRA 2026. [06/2025] One paper is accepted by IROS 2025. [05/2025] One paper is selected as the Best Conference Paper Award Finalist & Best Paper Award Finalist on Multi-Robot Systems at ICRA 2025. [01/2025] One paper is accepted by ICRA 2025. [07/2024] One paper is accepted by RAS 2024. [05/2024] I have passed Ph.D. Qualifying Examination to become a Ph.D. candidate. [02/2024] Best Poster Award at the 7th IEEE UK & Ireland RAS Conference. [06/2023] One paper is accepted by ECMR 2023. |
|
|
|

|
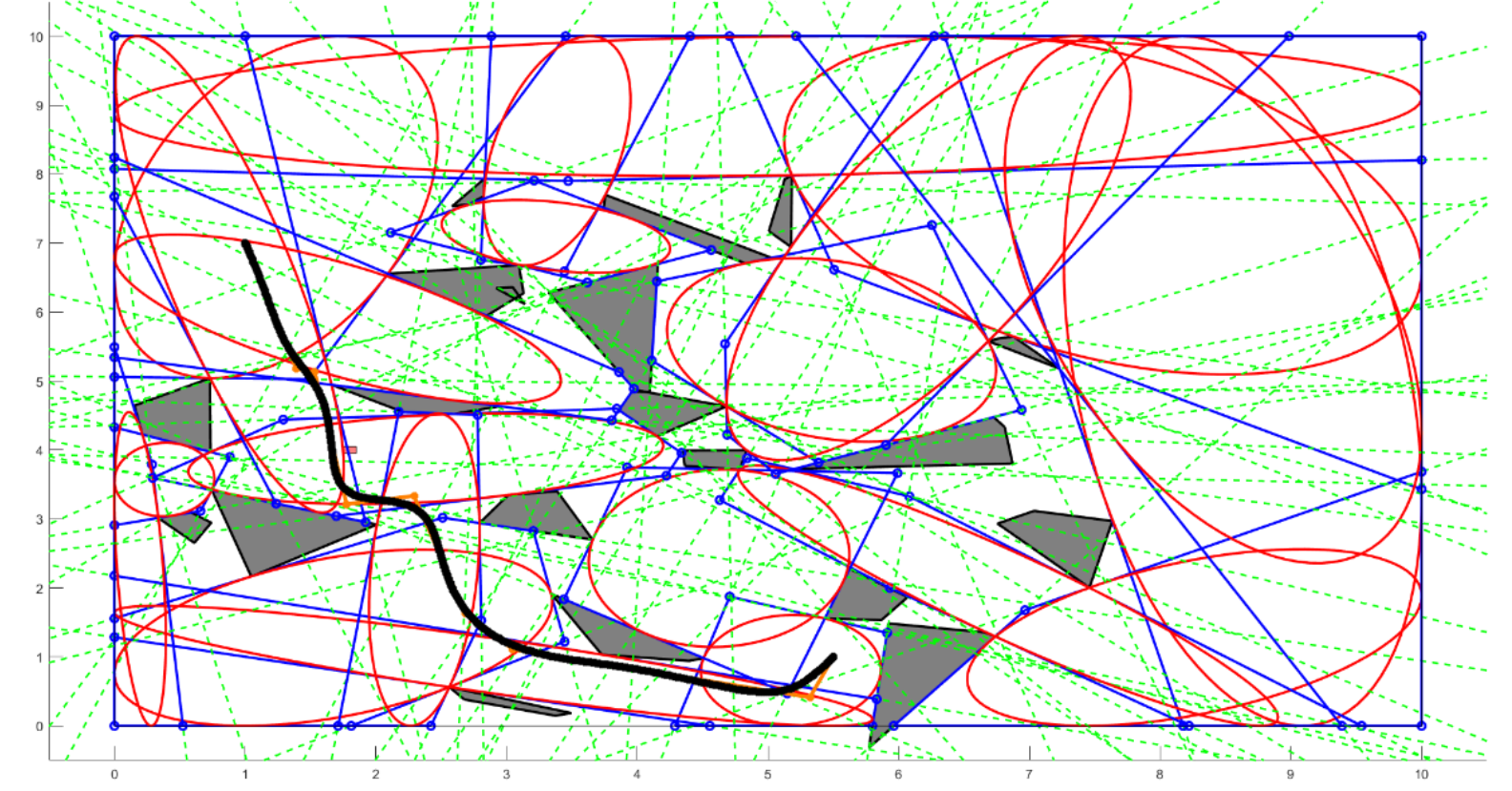
Multi-Nonholonomic Robot Exploration with Line-of-Sight Maintenance in Unknown Environments
2026 IEEE International Conference on Automation Science and Engineering (CASE)
We investigate distributed exploration with multiple nonholonomic robots under LoS connectivity constraints. |
|
Collaborative Human-Robot Object Transportation Using a Deformable Sheet
2026 IEEE International Conference on Robotics and Automation (ICRA)
We tackle real-time formation trajectory planning for collaborative object transportation in complex environments using a team of nonholonomic robots and a human. |
|
Robots Calling the Shots: Using Multiple Ground Robots for Autonomous Tracking in Cluttered Environments
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
We present a novel planning framework for differential-drive robots equipped with movable cameras. |
|
Multi-Nonholonomic Robot Object Transportation with Obstacle Crossing Using a Deformable Sheet
2025 IEEE International Conference on Robotics and Automation (ICRA)
Best Conference Paper Award Finalist & Best Paper Award Finalist on Multi-Robot Systems We proposed a motion planning framework for collaborative object transportation using a team of nonholonomic robots and a deformable sheet. |
|
A Decoupled Solution to Heterogeneous Multi-Formation Planning and Coordination for Object Transportation
Robotics and Autonomous Systems (RAS), 2024
Best Poster award at The 7th IEEE UK & Ireland RAS Conference
We present a cooperative formation object transportation system for heterogeneous multi-robot systems, which captures robot dynamics and avoids inter-formation collisions. |
|
Multi-Formation Planning and Coordination for Object Transportation
2023 European Conference on Mobile Robots (ECMR)
We propose a cooperative multi-formation object transportation system which explicitly handles inter-formation collisions. |
|
Multi-robot Object Delivery in Formation Based on Convex Optimization
Master Thesis
We propose a formation-level trajectory planning framework based on convex optimization. |
|

{kind=link}
|
2026.03, Exceptional Research Contribution of Doctoral Researchers in the College of Engineering and Physical Sciences - UoB. 2025.05, ICRA 2025 Best Conference Paper Award Finalist & Best Paper Award Finalist on Multi-Robot Systems - IEEE. 2024.07, RAS 2024 Best Poster award - IEEE. 2022.12, Computer Science School Prize - UoB. 2020.12, Comprehensive Scholarship - SWJTU. 2019.12, Comprehensive Scholarship - SWJTU. |
|
2025 13th International Conference on Robot Intelligence Technology and Applications (RITA) 2025 IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS) 2025 ACM International Conference on Autonomous Agents and Multiagent Systems (AAMAS) 2024, 2025, 2026 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024, 2025, 2026 IEEE International Conference on Robotics and Automation (ICRA) 2026 IEEE International Conference on Automation Science and Engineering (CASE) |
|
|
Skills: C++ / Python / Matlab, Linux, ROS |
|
|
Last update: 2026.08.01. |